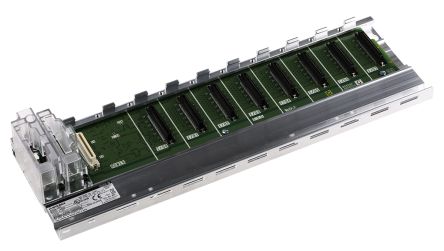
PLC란 무엇인가? PLC는 Programmable Logic Controller의 줄임말로 말 그대로 프로그래밍이 가능한 논리 제어 장치를 일컫는 말입니다. 스위치나 센서 등으로 입력을 받은 후에 CPU에서 연산이 일어나고 이 연산에 따라 순차적으로 출력이 제어됩니다. 제 포스팅에서도 보시다시피 예전에는 릴레이로도 순차제어를 많이 했으나, 유지보수 측면에서 릴레이 제어보다는 PLC 제어가 더 뛰어납니다. 속도나 안정성 측면에서도 PLC가 더 우세합니다. 또한 PLC는 카운터, 딜레이, 연산 등이 용이하다는 장점이 있습니다. 그렇다면 PLC라는 것의 실물은 대체 어떻게 생겼을 까요? PLC 구성 요소 PLC는 대표적으로 모듈형을 사용하며 다양한 기능을 하는 모듈을 끼워 원하는 시스템을 구성합니다. 1) ..